





















جميع المنتجات
-
جهاز رؤية ليلية بالأشعة تحت الحمراء محمول متعدد الوظائف
-
روبوت التخلص من الذخائر المتفجرة
-
روبوت استطلاع مصغر
-
الرؤية الليلية الرقمية أحادية البصر
-
جهاز الرؤية الليلية الرقمية
-
ضد القناص
-
الرادار المحمول
-
مصباح يدوي لتسجيل الدورية
-
معدات العمليات الخاصة التكتيكية
-
نطاق البندقية
-
ليزر مجموعة مكتشف
-
النموذج العسكري
-
المعدات التكتيكية
-
الطعم المضغوط
الروبوت المتوسط لقتل القتلى مع ذراع X-Y-Z لتنسيق التخلص الدقيق












| مكان المنشأ | الصين |
|---|---|
| اسم العلامة التجارية | Particle |
| رقم الموديل | REOD500 |
| الحد الأدنى لكمية | 1 |
| الأسعار | $205,761 |
| شروط الدفع | T/T |

اتصل بي للحصول على عينات مجانية وكوبونات
ال WhatsApp:0086 18588475571
(ويتشات): 0086 18588475571
سكايب: sales10@aixton.com
إذا كان لديك أي مخاوف، نحن نقدم المساعدة على الانترنت على مدار 24 ساعة.
xتفاصيل المنتج
| وزن منصة الروبوت | ≤350kg ((حوي بطاريات) | القدرة على تجاوز العقبة | ≥400 ملم |
|---|---|---|---|
| سمات | 1. تصميم ذراع ميكانيكي عالي القوة، يمنح أداء خطف قوي؛ 2. نظام مسار تعليق "كريستي"، تضاريس | مسافة القدرة على الصعود (وضع الإضاءة المنخفضة) | ≥45 درجة |
| ميزات خاصة | مقاومة للانفجار، ومقاومة للماء، والقدرة على نزع السلاح عن بعد | عمق الخوض (وضع التصوير الحراري) | ≥200 ملم |
| حجم الروبوت | ≥950 × 650 × 650 مم (مخزنة بالكامل) | طول الذراع | 2000mm |
| التطبيقات | الرد على العبوات الناسفة | مخالب | 2 |
| حجم وحدة التحكم | ≥270 مم × 170 مم × 100 مم | شاشة عرض وحدة التحكم | شاشة ال سي دي 7 بوصة |
| طريقة التشغيل | طريقة عمل مزدوجة من زر الدوار وشاشة اللمس | السرعة القصوى | ≥2m/s(5 تروس، متغيرة باستمرار) |
| اسم المنتج | أهداف المهمة الروبوت الوقائي الوقائي الثالث لتحديد تدابير التخلص من المخاطر ونقلها | عمق الخوض في منصة الروبوت | ≥500 مم ; |
| حجم منصة الروبوت | 1600 × 850 × 1300 مم (مخزنة بالكامل) ; | عمر البطارية | ≥3h (درجة الحرارة العادية) |
| درجة حرارة التشغيل | -40 درجة مئوية + 50 درجة مئوية | درجة إب | IP66 |
| وزن الروبوت | ≥50 كجم (يحتوي على مجموعتين من البطاريات) | عبر عرض القناة | ≥400 ملم |
| الحد الأقصى لوزن الخطف | ≥40 كجم | تسلق السلالم | ≥45 درجة |
| المفاصل المنقولة | 8 | وزن وحدة التحكم | .21.2 كجم (بدون حقيبة الظهر) |
| عرض الفيديو | 7 قنوات، واحدة منها تحتوي على وظيفة تكبير التركيز التلقائي | عرض الفيديو | 7 قنوات، واحدة منها تحتوي على وظيفة تكبير التركيز التلقائي |
| طريقة التحكم | التحكم بالكابل ≥100 متر (كابل قياسي)، التحكم اللاسلكي ≥1000 متر (خارجي) | درجة حرارة التخزين | 45 درجة مئوية ~ ~ 60 درجة مئوية |
| ذراع درجة IP | IP66 | ||
| إبراز | نظارات عسكرية ذات عينان تحت الحمراء,نظارات عسكرية محمولة,نظارة عسكرية متعددة الوظائف,Handheld military monoculars,Multifunctional military scope monocular |
||
منتوج وصف
روبوت متوسط الحجم للتخلص من الذخائر المتفجرة مزود بذراع تنسيق XYZ للتخلص الدقيق
الوصف والميزات
يعد روبوت JP REOD500 EOD حلاً متقدمًا للتخلص من الذخائر المتفجرة (EOD) في البيئات عالية المخاطر. يتميز هذا التصميم بنظام زاحف ذو ذراع متأرجح يجمع بين الزاحف الرئيسي وآلية عوائق ذراع متأرجحة، مما يحسن بشكل كبير من قدرات الروبوت على التنقل بين العوائق، مما يضمن أداء قويًا وموثوقًا في عمليات التخلص من الذخائر المتفجرة. تم تجهيز الروبوت بذراع آلية متعددة درجات الحرية التي توفر قدرات قوية في الإمساك والتعامل. تبلغ أبعاد JP REOD500 900 مم × 650 مم × 500 مم (مخزنة بالكامل) ووزن 42 كجم. تبلغ سرعتها القصوى ≥2.0 م/ث، وإزالة العوائق ≥320 مم، وقدرة على التدرج وتسلق السلالم تصل إلى 45 درجة، مما يضمن قدرة فائقة على المناورة في مختلف التضاريس.
يوفر JP REOD500 المجهز بمناول حرية بـ 8 درجات تحكمًا دقيقًا مع أقصى ارتفاع للإمساك يبلغ ≥1800 مم (المخلب الرئيسي) وأبعد مسافة إمساك تبلغ ≥1400 مم (المخلب الرئيسي). يدعم الروبوت شاشة عرض فيديو ذات 7 قنوات، مما يتيح منظورات مراقبة أكثر ثراءً، ويتميز بقدرات العرض في الوقت الفعلي للوضعية ثلاثية الأبعاد عن بعد. مع عمر بطارية يصل إلى ≥3 ساعات في درجة الحرارة العادية، وتصنيف IP67 لمقاومة الغبار والماء، وطرق التحكم التي تشمل التحكم في الكابلات حتى 120 مترًا والتحكم اللاسلكي حتى 1200 متر، تم تصميم JP REOD500 من أجل الموثوقية وتعدد الاستخدامات في الظروف الصعبة. بالإضافة إلى ذلك، فهي توفر خيارات تخصيص OEM وODM لتلبية الاحتياجات التشغيلية المحددة.
تصميم محسّن للذراع الميكانيكي - أداء إمساك محسّن بشكل كبير
يتميز JP REOD500 بتصميم ذراع ميكانيكي محسّن يعمل على تحسين قدرات الإمساك به بشكل كبير. يمكّن هذا التصميم المتقدم الروبوت من التعامل مع مجموعة متنوعة من الأشياء الخطرة بدقة وقوة أكبر، مما يعزز الكفاءة الإجمالية لعمليات التخلص من الذخائر المتفجرة.
تصميم براءة اختراع مبتكر "2-Claws" - قدرات متعددة المهام
يسمح تصميم "2-Claws" الحاصل على براءة اختراع لـ JP REOD500 بحل مهام متعددة في وقت واحد. باستخدام كل من المخلب الأساسي والمخلب المساعد، يمكن للروبوت إجراء عمليات معقدة، مثل الإمساك بالأشياء أثناء فتح الأبواب أو أداء مهام مساعدة أخرى، مما يجعله فعالاً للغاية في مهام التخلص من الذخائر المتفجرة.
التشغيل ثنائي الوضع بيانيًا - تجربة تشغيل مريحة وموثوقة
توفر عملية الوضع المزدوج الرسومية للمستخدمين واجهة بديهية للتحكم في الروبوت. يتم دعم كل من أدوات التحكم التي تعمل باللمس وعصا التحكم، مما يضمن سهولة الاستخدام والموثوقية في البيئات عالية الضغط. يلغي هذا التصميم حاجة المستخدمين إلى حفظ وظائف الأزرار المعقدة، مما يقلل من وقت التدريب ويحسن الكفاءة التشغيلية.
عرض ثلاثي الأبعاد في الوقت الحقيقي عن بعد - تشغيل جيد أمام عينيك
يستخدم JP REOD500 تقنية العرض الافتراضية ثلاثية الأبعاد المتقدمة للحصول على تعليقات في الوقت الفعلي عن حالة الروبوت. تتيح هذه الميزة للمشغلين رؤية حالة الروبوت ثلاثية الأبعاد من زوايا مختلفة، مما يوفر فهمًا بديهيًا ومفصلاً لموقع الروبوت وبيئته، حتى عندما يعمل خارج خط الرؤية.
 |
تصميم ذكي للتحكم المسبق — إعداد شخصي لوضعية العمل
يسمح تصميم التحكم الذكي "المسبق" لـ JP REOD500 بالوصول تلقائيًا إلى المواضع المحددة مسبقًا بنقرة واحدة، بناءً على احتياجات المستخدم. تعمل هذه الميزة على تبسيط عملية التشغيل، مما يقلل من مقدار التدخل اليدوي المطلوب ويضمن تنفيذ المهام بسرعة وموثوقية.
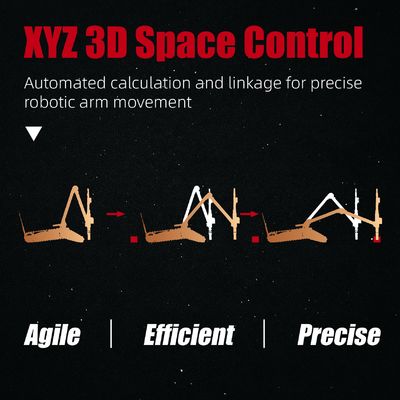
تصميم وصلة الذراع الروبوتية الفضائية ثلاثي الأبعاد "XYZ" - تحكم دقيق
يستخدم JP REOD500 تصميم وصلة ذراع آلي ثلاثي الأبعاد "XYZ" يعتمد على الحساب التلقائي، مما يوفر تحكمًا دقيقًا في حركات الروبوت. يعزز هذا التصميم كفاءة ودقة مهام التخلص من القنابل، مما يقلل من متوسط وقت التشغيل بنسبة تصل إلى 80% مقارنة بالتحكم التقليدي أحادي المفصل.
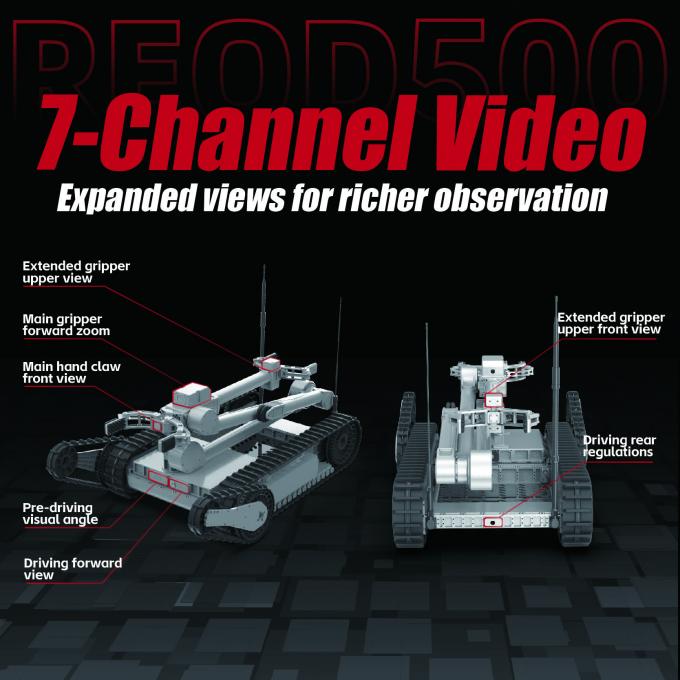
نظام فيديو ذو 7 قنوات - وجهات نظر مراقبة أكثر ثراءً
مزود بنظام فيديو ذو 7 قنوات، يوفر JP REOD500 زوايا مراقبة متعددة لتعزيز الوعي الظرفي. يقوم نظام التصوير بالتبديل تلقائيًا بين وضع القيادة ووضع المقبض الأساسي ووضع المقبض المساعد، مما يتكيف مع سياق التشغيل للحصول على عرض مثالي.
 |
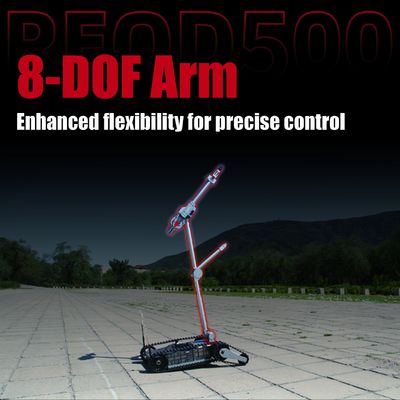
تصميم ذراع آلي ذو 8 درجات من الحرية — تحكم أكثر مرونة
يمنح تصميم الذراع الآلي ذو 8 درجات من الحرية إمكانيات الوصول المكاني القوية لـ JP REOD500، مما يسمح له بأداء المهام في البيئات المرتفعة أو المنخفضة أو العميقة أو سطح الطاولة. هذه المرونة تجعلها مناسبة لمجموعة واسعة من عمليات التخلص من الذخائر المتفجرة التي تتطلب الدقة والقدرة على التكيف.
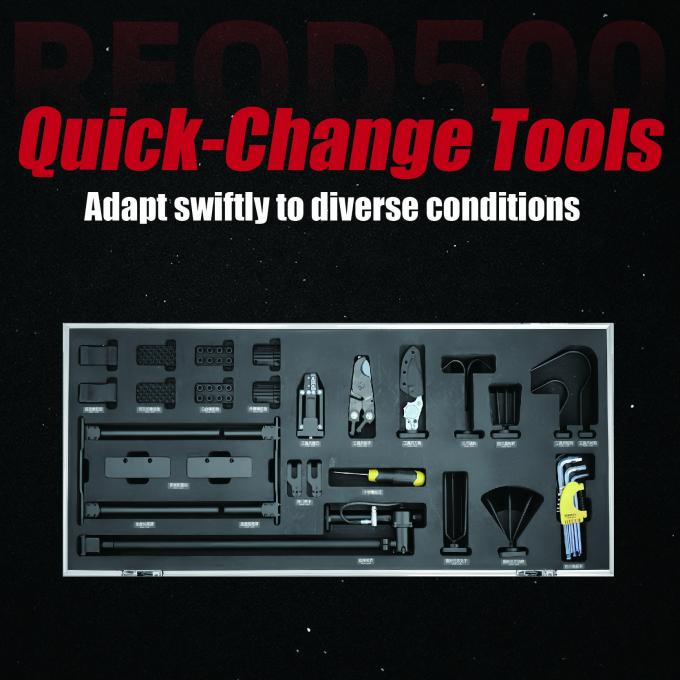
نظام أداة سريع التغيير متعدد الاستخدامات — قابل للتكيف مع ظروف العمل المختلفة
تم تجهيز JP REOD500 بنظام أدوات التغيير السريع متعدد الاستخدامات، بما في ذلك مجموعات أدوات الإمساك المتعددة ومجموعات الأدوات الأساسية ومجموعات الأدوات الموسعة. ويمكن تبديل هذه الأدوات بسرعة بناءً على المتطلبات التشغيلية المحددة، مما يمكّن الروبوت من التكيف بسلاسة مع ظروف العمل المختلفة ومعالجة أنواع مختلفة من المخاطر بفعالية.
 |
التطبيقات
 |
معرض الصور
 |
 |
 |
المعلمات التقنية
| منصة الروبوت | |
| مقاس | ≥950 × 650 × 650 مم (مخزنة بالكامل) |
| وزن | ≥50 كجم (يحتوي على مجموعتين من البطاريات) |
| السرعة القصوى | ≥2m/s (5 تروس، متغيرة باستمرار) |
| أكثر من عقبة القدرة | ≥400 مم |
| عبر عرض الأخدود | ≥400 مم |
| القدرة على التدرج | ≥45 درجة |
| تسلق السلالم | ≥45 درجة |
| عمق الخوض | ≥200 ملم |
| عمر البطارية (درجة الحرارة العادية) | ≥3h |
| أداء الإمساك بالذراع الروبوتية | |
| طول الذراع | 2000 ملم |
| الحد الأقصى لوزن الخطف | ≥40 كجم |
| مخالب | 2 |
| المفاصل المنقولة | 8 |
| وحدة تحكم محمولة | |
| مقاس | ≥270 مم × 170 مم × 100 مم |
| وزن | .21.2 كجم (بدون حقيبة الظهر) |
| شاشة العرض | شاشة ال سي دي 7 بوصة |
| عرض الفيديو | 7 قنوات، إحداها تحتوي على وظيفة تكبير التركيز التلقائي |
| طريقة التشغيل | تشغيل ثنائي الوضع للزر الهزاز وشاشة اللمس |
| طريقة التحكم | التحكم بالكابل ≥100 م (الكابل القياسي)، التحكم اللاسلكي ≥1000 م (خارجي) |
| مستوى الحماية والقدرة على التكيف البيئي | |
| منصة الروبوت | IP66 |
| ذراع | IP66 |
| درجة حرارة التشغيل | -40 درجة مئوية~+50 درجة مئوية |
| درجة حرارة التخزين | -45 درجة مئوية~+60 درجة مئوية |
اتصل بنا
السيدة ايمي
واتساب/ويشات:+86 13621280280
المنتجات الموصى بها