





















جميع المنتجات
-
جهاز رؤية ليلية بالأشعة تحت الحمراء محمول متعدد الوظائف
-
روبوت التخلص من الذخائر المتفجرة
-
روبوت استطلاع مصغر
-
الرؤية الليلية الرقمية أحادية البصر
-
جهاز الرؤية الليلية الرقمية
-
ضد القناص
-
الرادار المحمول
-
مصباح يدوي لتسجيل الدورية
-
معدات العمليات الخاصة التكتيكية
-
نطاق البندقية
-
ليزر مجموعة مكتشف
-
النموذج العسكري
-
المعدات التكتيكية
-
الطعم المضغوط
الروبوت المدمج متعدد الوظائف لإزالة القنابل







| مكان المنشأ | الصين |
|---|---|
| اسم العلامة التجارية | Particle |
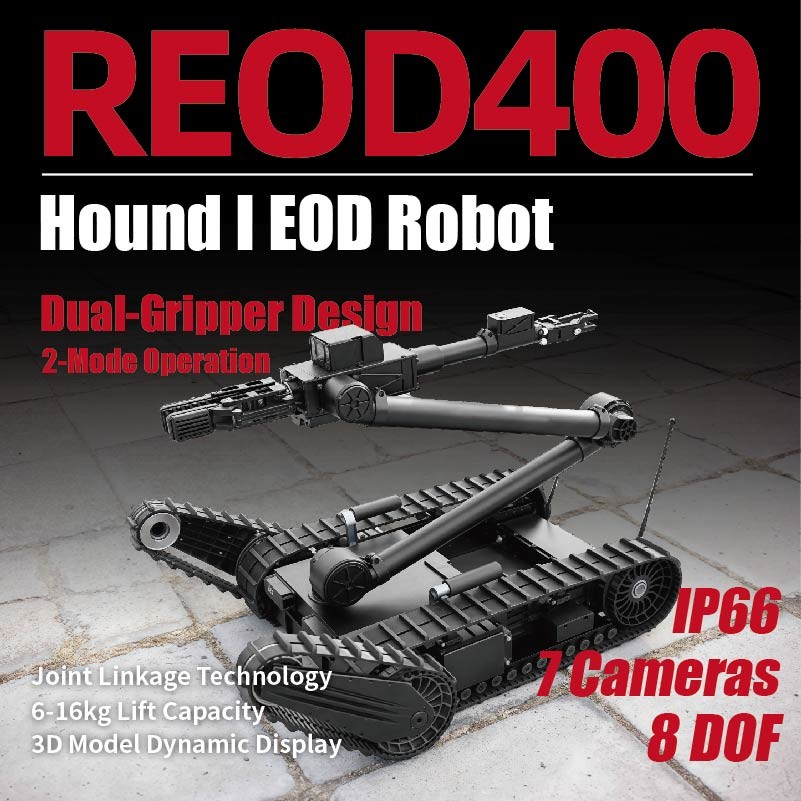
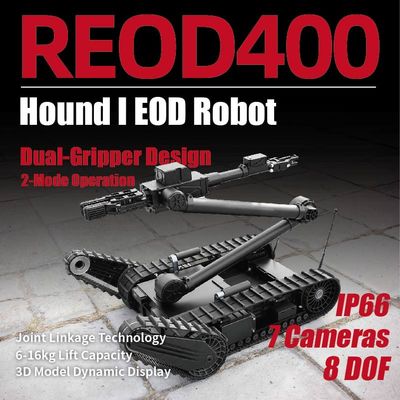
| رقم الموديل | REOD400 |
| الأسعار | $17,000 |

اتصل بي للحصول على عينات مجانية وكوبونات
ال WhatsApp:0086 18588475571
(ويتشات): 0086 18588475571
سكايب: sales10@aixton.com
إذا كان لديك أي مخاوف، نحن نقدم المساعدة على الانترنت على مدار 24 ساعة.
xتفاصيل المنتج
| رؤية ليلية | نعم | دقة | عالي |
|---|---|---|---|
| وظيفة | متعدد الوظائف | رؤية | رؤية ليلية |
| متانة | متين | وزن | ≥37 كجم (يحتوي على مجموعتين من البطاريات) |
| وقت العمل (درجة حرارة الغرفة) | ≥2H | درجة حرارة التشغيل | -40 درجة مئوية + 50 درجة مئوية |
| درجة إب | IP66 | مقاس | ≤830 مم × 600 مم × 460 مم (مخزنة بالكامل) |
| القدرة على تجاوز العقبة | ≥300 ملم | التداول | ≥45 درجة |
| المفاصل المنقولة | 8 | أقصى عرض لفتح القابض | ≥160 ملم |
| طريقة التشغيل | طريقة عمل مزدوجة من زر الدوار وشاشة اللمس | عمر البطارية (درجة الحرارة العادية) | ≥2H |
| عبر عرض القناة | ≥400 ملم | تسلق السلالم | ≥45 درجة |
| أقصى مسافة للقبض | ≥1650ملم | قدرة الرفع | 6-16 كجم |
| طريقة التحكم | التحكم بالكابل ≥100 متر (كابل قياسي)، التحكم اللاسلكي ≥1000 متر (خارجي) | ||
| إبراز | نظارات رؤية ليلية تحت الحمراء متعددة الوظائف,نظارات رؤية ليلية بالأشعة تحت الحمراء عالية الدقة,النظارات الحرارية المحمولة,High Resolution infrared night vision goggles,Handheld thermal imaging goggles |
||
منتوج وصف
روبوت Hound-I للتخلص من الذخائر المتفجرة خفيف الوزن
الوصف والميزات
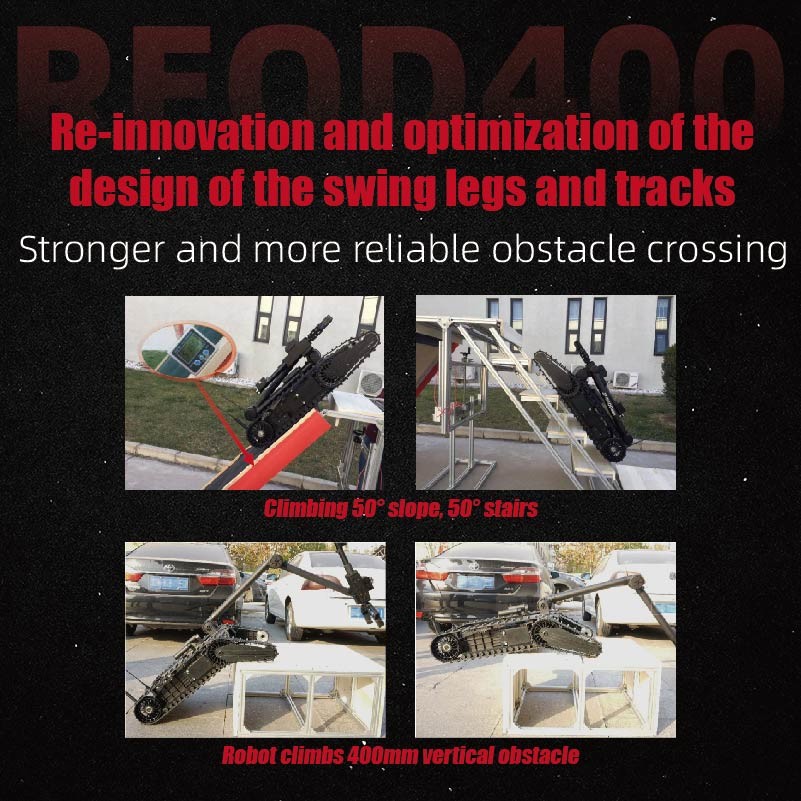
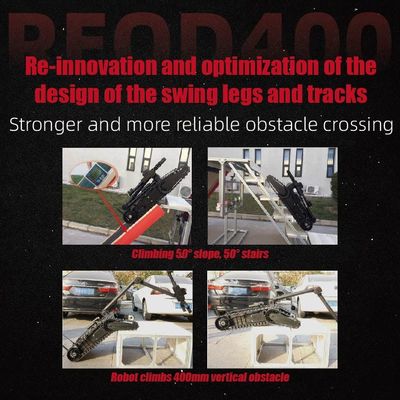
يعد روبوت REOD400 EOD حلاً متقدمًا للتخلص من الذخائر المتفجرة (EOD) في البيئات عالية المخاطر. يتميز بتصميم فريد من نوعه "ذو قابضين"، ويمكنه أداء مهام متنوعة في وقت واحد، مما يجعله عالي الكفاءة في عمليات مثل مكافحة الإرهاب في المناطق الحضرية، والسلامة العامة، والإغاثة من الزلازل، والتخلص من القنابل. الروبوت صغير الحجم وخفيف الوزن، بأبعاد ≥830 مم × 600 مم × 460 مم (مخزن بالكامل) ووزن ≥37 كجم. تبلغ سرعتها القصوى ≥1.8 م/ث مع 5 تروس ومحرك متغير مستمر، وإزالة العوائق ≥300 مم، وقدرة على التدرج وتسلق السلالم تصل إلى 45 درجة، مما يضمن قدرة فائقة على المناورة والقدرة على التكيف في مختلف التضاريس.
مجهزة بـ 8 درجات من الحريةمناور، يوفر REOD400 تحكمًا دقيقًا مع أقصى ارتفاع للإمساك يبلغ ≥1700 مم (المخلب الرئيسي) وأبعد مسافة إمساك تبلغ ≥1380 مم (المخلب الرئيسي). يدعم الروبوت شاشة عرض فيديو ذات 7 قنوات، مما يتيح منظورات مراقبة أكثر ثراءً، ويتميز بقدرات العرض في الوقت الفعلي للوضعية ثلاثية الأبعاد عن بعد. مع عمر بطارية يصل إلى ≥2 ساعة في درجة الحرارة العادية، وتصنيف IP66 لمقاومة الغبار والماء، وطرق التحكم التي تشمل التحكم في الكابلات حتى 100 متر والتحكم اللاسلكي حتى 1000 متر، تم تصميم REOD400 من أجل الموثوقية وتعدد الاستخدامات في الظروف الصعبة. بالإضافة إلى ذلك، فهي توفر خيارات تخصيص OEM وODM لتلبية الاحتياجات التشغيلية المحددة.
تصميم "المقبض المزدوج" المبتكر — يعزز المرونة والجدوى في تنفيذ المهام
يتميز تصميم "المقبض المزدوج" المبتكر بذراع آلية مجهزة بـ "مخلب الإمساك الأساسي" و"مخلب تمديد متعدد الوظائف". ويعزز هذا التصميم بشكل كبير مرونة الروبوت وجدواه في تنفيذ المهام، مما يوفر دعمًا فعالاً لإكمال مجموعة متنوعة من المهام في عملية واحدة. يعالج تصميم "المقبض المزدوج" بشكل فعال القيود المفروضة على الروبوتات التقليدية للتخلص من القنابل التي تحتوي على "قابض واحد" فقط، والذي لا يمكنه أداء مهام في وقت واحد مثل "الإمساك بالأشياء الخطرة" و"فتح الأبواب، والقطع، والتثبيت، والقطع، والربط، وغيرها من الإجراءات المساعدة". على سبيل المثال، يمكنه إنجاز مهام مثل "فتح الباب والاستيلاء على شيء ما دفعة واحدة".
نجح تصميم "المقبض المزدوج" في تحرير "مخلب الإمساك الأساسي" من الاضطرار إلى أداء وظائف أخرى غير الإمساك، وبالتالي تعزيز قدرات الروبوت على الإمساك بشكل كبير. يمكن للمخلب الأساسي الإمساك بالأشياء الخطرة المشبوهة التي يتراوح وزنها بين 6 و16 كجم، مع عرض إمساك يصل إلى 160 مم وقوة تثبيت قصوى تبلغ 300 نيوتن. بالإضافة إلى ذلك، اعتمادًا على المهام التشغيلية المحددة، يمكن استبدال "مجموعة أدوات القابض" بسرعة للتعامل مع أنواع وأشكال مختلفة من العناصر الخطرة.
دعم التحكم باللمس/عصا التحكم - المزيد من التفاعل سهل الاستخدام والتشغيل الموثوق
يعد تصميم عملية التحكم الرسومية التي تعمل باللمس / عصا التحكم حاليًا حلاً رائدًا للتحكم في روبوت التخلص من القنابل على المستوى الدولي. لقد تم الاعتراف به بشكل كبير من قبل المستخدمين لتفاعله الأكثر سهولة في الاستخدام وتشغيله الموثوق. ميزاته الرئيسية هي كما يلي:
- تصميم العمليات الرسومية:تم تصميم جميع العمليات بطريقة رسومية، مما يلغي حاجة المستخدمين إلى حفظ وظائف الأزرار المعقدة وبروتوكولات التشغيل. هذه الواجهة سهلة الاستخدام تجعل العملية بسيطة وبديهية، مما يقلل بشكل كبير من وقت التدريب.
- تصميم عملية التحكم باللمس/عصا التحكم:يمكن استخدام كل من أزرار عصا التحكم وشاشة اللمس لإجراء جميع عمليات الروبوت. لا يؤدي التكرار الذي توفره طريقتا التشغيل هاتان إلى تعزيز موثوقية النظام فحسب، بل يعمل أيضًا على تحسين الكفاءة التشغيلية من خلال الجمع بين أزرار عصا التحكم وعناصر التحكم التي تعمل باللمس.
|
|
عرض ثلاثي الأبعاد في الوقت الحقيقي عن بعد - في متناول اليد، تشغيل أكثر سهولة
نظرًا لأن روبوتات التخلص من القنابل غالبًا ما تعمل خارج خط الرؤية أثناء المهام، فإن المعلومات في الوقت الفعلي حول الزوايا والمواقع المكانية لمفاصل الروبوت تعد أمرًا بالغ الأهمية للمشغلين. يستخدم REOD400 روابط عالية السرعة وتكنولوجيا كمبيوتر متقدمة ليس فقط لتحقيق تعليقات في الوقت الفعلي لمعلومات حالة الروبوت ولكن أيضًا لتوظيف تقنية العرض الافتراضية ثلاثية الأبعاد الرائدة للعرض في الوقت الفعلي عن بعد لحالة الروبوت ثلاثية الأبعاد. وهذا يجعل الروبوت يشعر بأنه "قريب في متناول اليد" حتى عندما يكون "بعيدًا"، مما يسمح بتشغيل أكثر سهولة.
الميزات الرئيسية للعرض في الوقت الحقيقي ثلاثي الأبعاد عن بعد هي كما يلي:
- عرض في الوقت الحقيقي لحالة الروبوت ثلاثية الأبعاد
- مراقبة حالة الروبوت ثلاثية الأبعاد من زوايا مختلفة
- تكبير وتصغير حالة الروبوت ثلاثية الأبعاد
تعمل وحدة التحكم المحمولة للروبوت على إعادة إنتاج الحالة ثلاثية الأبعاد للروبوت عن بعد، مما يسمح بتكبير النموذج ثلاثي الأبعاد وتصغيره ومراقبته من أي زاوية.
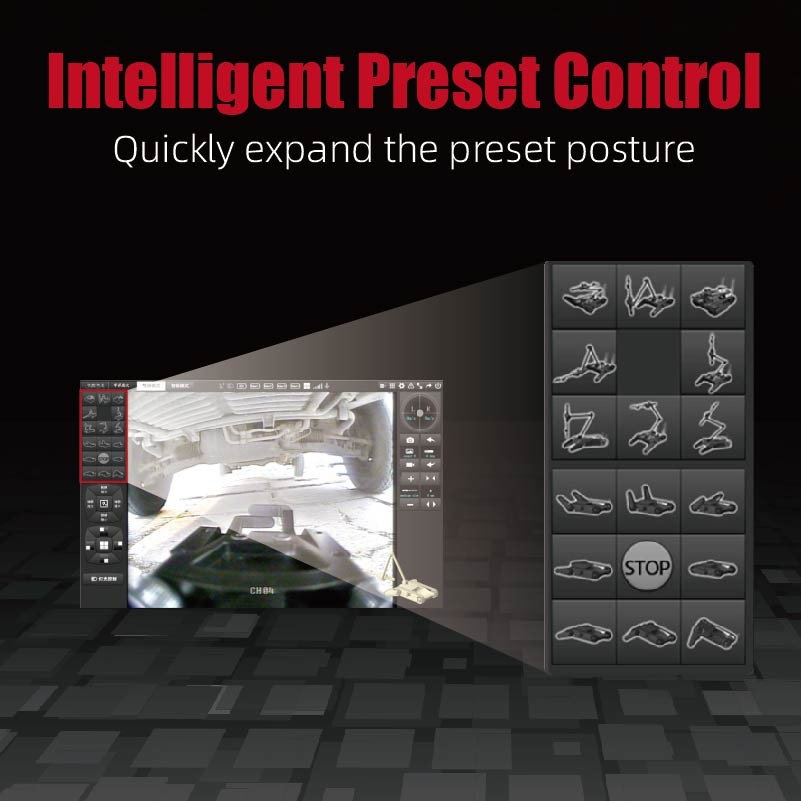
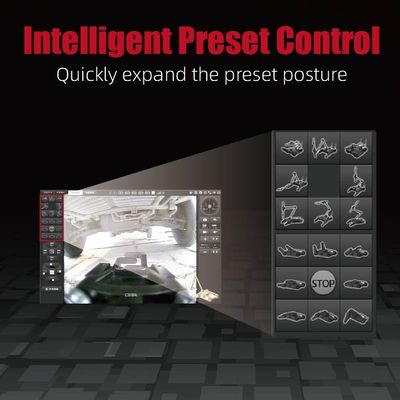
تصميم ذكي للتحكم في الوضع مسبقًا - تشغيل أبسط وأسرع
ومن خلال "التحكم الذكي في الوضعية المحددة مسبقًا للمهام المشتركة"، يمكن للروبوت "الوصول تلقائيًا إلى الوضعية المحددة مسبقًا بنقرة واحدة" بناءً على احتياجات المستخدم. تقلل هذه الميزة بشكل كبير من مقدار التشغيل اليدوي المطلوب في الموقع، وتعمل كمساعد فعال لمشغلي الخطوط الأمامية وتعزز موثوقية وسلامة مهام التخلص من القنابل.
تقنية الربط المشترك "XYZ" - تحكم أكثر دقة وكفاءة
إن تصميم عملية تقنية الربط المشترك "XYZ" القائم على الحساب التلقائي، والمعروف أيضًا باسم "تصميم التحكم في ترجمة القابض القائم على الإحداثيات الديكارتية"، يحول التحكم التقليدي "المفصل الواحد" لروبوتات التخلص من القنابل إلى تحكم "منسق متعدد المفاصل". يؤدي هذا إلى تحسين الكفاءة التشغيلية والدقة لروبوتات التخلص من القنابل بشكل كبير. بالمقارنة مع تصميم التحكم "المفصل الواحد"، فهو يقلل من متوسط وقت التشغيل بنسبة 80%.
يحقق REOD400 "التحكم في ترجمة القابض القائم على الإحداثيات الديكارتية" من خلال الحساب التلقائي. من أجل الإمساك بالعناصر الخطرة المشبوهة في مساحة أفقية أحادية البعد، فإنه يتحكم بسرعة في الروبوت لتحقيق "حركة منسقة متعددة المفاصل" لترجمة القابض الفضائي أحادي البعد. وهذا يقلل بشكل كبير من صعوبة التشغيل ويزيد من الدقة، مما يسمح بتحديد المواقع بشكل فوري تقريبًا دون الحاجة إلى تكرارات متكررة.
نظام التصوير المتكيف مع الوضع — سبع طرق عرض للكاميرا لتعزيز المراقبة
يعمل نظام التصوير الخاص بالروبوت بمثابة عيون المشغل. يتميز REOD400 بتصميم مبتكر لنظام التصوير المتكيف مع الوضع مع نظام من 7 كاميرات، مما يعزز بشكل كبير قدرة مشغلي الخطوط الأمامية على إدراك البيئات البعيدة. إن تصميم النظام المكون من 7 كاميرات ليس ترتيبًا بسيطًا ولكنه عبارة عن تحسين وتحسين بناءً على المشكلات التي يواجهها المستخدمون أثناء الاستخدام الفعلي.
ينقسم نظام التصوير بشكل عام إلى ثلاث مجموعات من الصور: وضع القيادة، ووضع القابض الأساسي، ووضع القابض الممتد. فهو يقوم بالتبديل تلقائيًا بين هذه الأوضاع بناءً على المهام النموذجية مثل القيادة والإمساك والمراقبة، مما يوفر وعيًا بيئيًا أقوى عن بعد ومجموعة أكثر ثراءً من زوايا المراقبة.
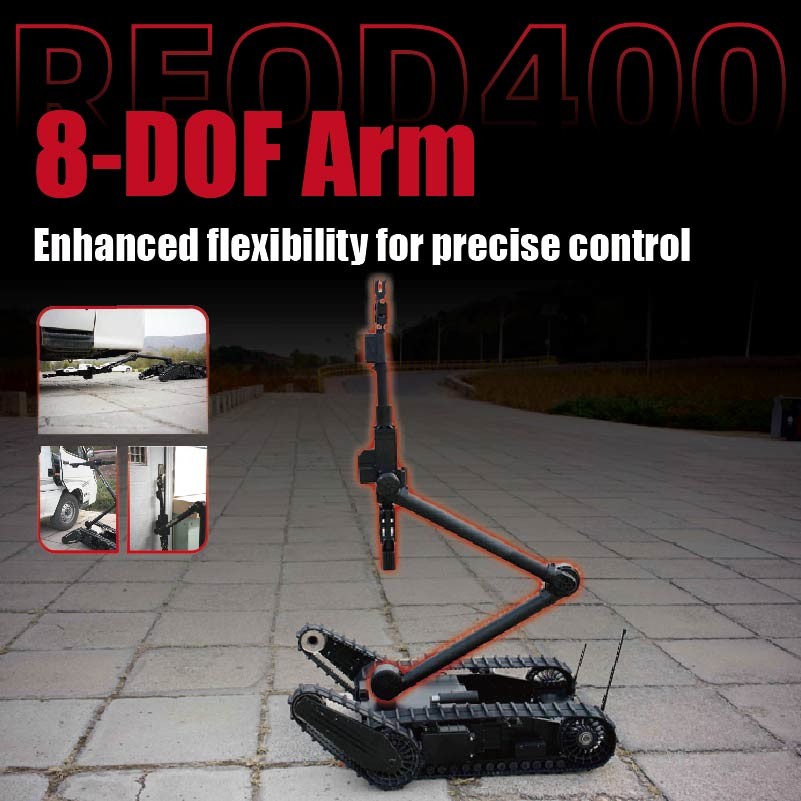
تصميم ذراع آلي متكامل بثمان درجات من الحرية - تحكم أكثر مرونة وأمانًا
يتميز الذراع الآلي REOD400 بتصميم متكامل بزاوية 8 درجات من الحرية، مما يوفر إمكانات وصول مكانية قوية. يسمح هذا التصميم للذراع الآلي ليس فقط بأداء مهام التخلص من القنابل التقليدية ولكن أيضًا العمليات التي لا تستطيع روبوتات التخلص من القنابل التقليدية بدرجة 5 أو 6 درجات من الحرية التعامل معها، مثل الإمساك بالأشياء في الحفرة المرتفعة أو المنخفضة أو العميقة أو البيئات المنضدية، بالإضافة إلى إجراء استطلاع متعدد الزوايا في بيئات الحفرة العالية والمنخفضة والعميقة.
نظام أداة التغيير السريع متعدد الاستخدامات
تم تجهيز الروبوت REOD400 بـ 18 نوعًا من "أدوات التغيير السريع"، بما في ذلك 6 مجموعات أدوات إمساك، و6 مجموعات أدوات أساسية، و6 مجموعات أدوات ممتدة، مما يسمح بالاستبدال السريع لـ "مجموعات أدوات الإمساك" بناءً على المهام التشغيلية المختلفة وأنواع وأشكال الأجسام الخطرة المختلفة، وبالتالي تلبية الاحتياجات التشغيلية المتنوعة للمستخدمين.
التطبيقات
معرض الصور
المعلمات التقنية
| منصة الروبوت | |
| مقاس | ≥830 × 600 × 460 مم (مخزنة بالكامل) |
| وزن | ≥37 كجم (يحتوي على مجموعتين من البطاريات) |
| السرعة القصوى | ≥ 1.8 م/ث (5 تروس، متغيرة باستمرار) |
| أكثر من عقبة القدرة | ≥300 ملم |
| عبر عرض الأخدود | ≥ 400 ملم |
| القدرة على التدرج | ≥45 درجة |
| تسلق السلالم | ≥45 درجة |
| عمر البطارية (درجة الحرارة العادية) | ≥2h |
| درجة الملكية الفكرية | IP66 |
| أداء الإمساك بالذراع الروبوتية | |
| الدولة الممتدة | ≥6 كجم |
| الدولة المتراجعة | ≥16 كجم |
| مخالب | 2 |
| المفاصل المنقولة | 8 |
| الحد الأقصى لارتفاع المراقبة | ≥2400 ملم |
| أقصى ارتفاع للإمساك | ≥1700 ملم(المخلب الرئيسي)،≥2000 ملم(نائب مخلب) |
| أبعد مسافة الاستيلاء | ≥1380 ملم(المخلب الرئيسي)،≥1650 ملم(نائب مخلب) |
| أقصى عرض لفتح القابض | ≥160 ملم |
| وحدة تحكم محمولة | |
| مقاس | ≥360×210×70 ملم |
| وزن | ≥2 كجم (بدون حقيبة الظهر) |
| شاشة العرض | شاشة ال سي دي 10.1 بوصة |
| عرض الفيديو | 7 قناة |
| طريقة التشغيل | تشغيل ثنائي الوضع للزر الهزاز وشاشة اللمس |
| طريقة التحكم | التحكم بالكابل ≥100 م (الكابل القياسي)، التحكم اللاسلكي ≥1000 م (خارجي) |
اتصل بنا
السيدة ايمي
واتساب: +86 13621280280
المنتجات الموصى بها